
Arduino meArm机械臂,学习笔记1

伺服电机(舵机)
伺服电机主要参数
代理POS机
连线说明
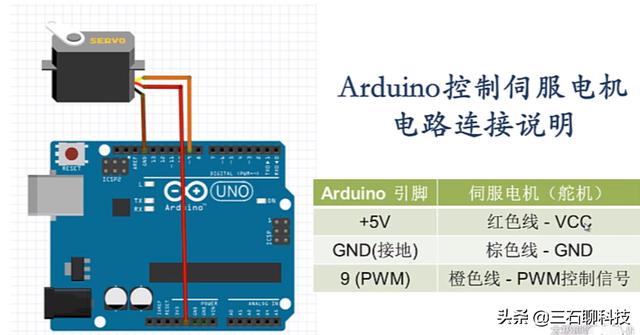
servo 英 [?s??v??] n. 伺服;伺服系统;随动系统
attach 拉卡拉POS机办理英 [??t?t?] vt. 使依附;贴上;系上;使依恋 vi. 附加;附属;伴随
控制代码
#include <Servo.h> Servo myservo; // 创建Servo对象用以控制伺服电机 // 很多开发板允许同时创建12个Servo对象 int pos=0; // 存储伺服电机角度信息的变量 void setup() { myservo.attach(9); // Servo对象连接在9号引脚 POS机申请Serial.begin(9600);} void loop() { for (pos=0; pos <=180; pos=45) { // 0度转到180度 // 每一步增加1度 myservo.write(pos); // 告诉伺服电机达到'pos'变量的角度 Serial.println(pos); delay(1000); // 等待15毫秒以确保伺服电机可以达到目标角度 } for (pos=180; pos >=0; pos -=45) { // 180度转到0度 myservo.write(pos); // 告诉伺服电机达到'pos'变量的角度 Serial.println(pos); delay(1000); // 等待15毫秒以确保伺服电机可以达到目标角度 }}
运行结果:
串口通信
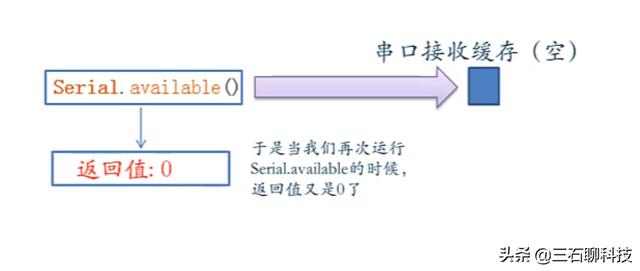
测试代码
/*ASCII 代码查询工具 (1.0)by 太极创客 (2017-06-01)www.taichi-maker.com 在串口监视器中输入字符并点击发送,串口监视器将输入字符的ASCII代码进行显示。*/ void setup() { Serial.begin(9600); Serial.println("Please input serial data.");} void loop() { // check if data has been sent from the computer: if (Serial.available()>0 ) { //检查串口缓存中是否有数据等待读取 Serial.println("======================"); char serialData=Serial.read(); //读取串口缓存中等待的字符 //并赋值给字符变量serialData Serial.print("Your serialData: '"); Serial.print(serialData); //显示刚刚读取到的字符 Serial.println("'"); Serial.print("serialData in DEC "); Serial.println(serialData, DEC); //显示刚刚读取到字符的ASCII编码(十进制) Serial.print("serialData in BIN "); Serial.println(serialData, BIN); //显示刚刚读取到字符的ASCII编码(二进制) Serial.print("serialData in OCT "); Serial.println(serialData, OCT); //显示刚刚读取到字符的ASCII编码(八进制) Serial.print("serialData in HEX "); Serial.println(serialData, HEX); //显示刚刚读取到字符的ASCII编码(十六进制) Serial.println("======================"); }}
输出结果:
POS机费率 pos机套现 pos机手续费
拉卡拉POS机免费申请,免费办理,卡拉合伙人,添加QQ/微信:191506129 备注:POS机!
如若转载,请注明出处:https://www.hhhrkala.com/38622.html
相关推荐
-
POS机领取:信用卡里面多存了钱怎么办?
信用卡里面多存了钱怎么办? 信用卡里面如果多存了钱,可以采取以下方式处理: 一、使用信用卡消费 如果多存的钱不是很多,等到下次消费的时候,使用信用卡,发卡行在记账时,会优先扣除溢缴…
-
POS机领取:大牛说 – 移动支付中的“银联支付”是如何实现的?
大牛说 | 移动支付中的“银联支付”是如何实现的? 作者介绍:码大牛,成长于传智播客和黑马程序员的专家型顾问。 【大牛说】 大牛老师从今天开始推出一个固定栏目,打算自己或者找朋友说…
-
拉卡拉POS机电签版:流量卡保姆级教程:保号套餐+流量卡副卡的神级运用
流量卡保姆级教程:保号套餐+流量卡副卡的神级运用 你是否长期默认按营业厅套餐缴纳高额话费,却不知如何改变现状?你是否不能理解为什么有人经常换卡却不怕换绑带来的各种烦恼?大家都在讨论…
-
拉卡拉智能POS机:店员把消费者和老板一起骗了:以门店名义签合同、用私人的pos机收款_1
店员把消费者和老板一起骗了:以门店名义签合同、用私人的pos机收款 河南商报见习记者 张逸菲/文 左冬辰/图 有了自己的小家后,鲍女士在一家全屋定制门店定制了橱柜和衣柜,准备把家里…
-
推动租房市场“去押金化” 长租机构又有新动作
推动租房市场“去押金化” 长租机构又有新动作 从2022年中央经济工作会议提出要探索长租房市场发展,到“年轻人能否终身租房”话题引发热议,住房租赁领域近来成为多方关注重点,如何为年…
-
申请POS机:实用:信用卡循环还款,有技巧
实用:信用卡循环还款,有技巧 当资金不是很充足的时候,有的朋友就会想到用信用卡循环还款的方式来缓解资金紧张问题。下边小天给大家介绍一些小技巧~ 单张循环还款技巧攻略 1、在用信用卡…
-
正规POS机:信用卡使用的十三个秘密教程
信用卡使用的十三个秘密教程 关于信用卡的知识和经验大家多多少少都有一些,但是没有系统学习难免会有盲点和漏洞,小编分享信用卡使用中的一些小秘密,让大家成为 360 度无死角的信用卡达…
-
智能POS机:一家3口用POS机替人“养卡”267张,涉案值高达1.8亿
一家3口用POS机替人“养卡”267张,涉案值高达1.8亿 来源:券商中国 信用卡催生出一批无力还钱的“卡奴”,也催生了一批信用卡养卡人,他们收取一定的费用,专门替人偿还信用卡欠款…
-
拉卡拉代理:信用卡申请多久能拿卡?不同银行办卡时间有所区别
信用卡申请多久能拿卡?不同银行办卡时间有所区别 经常有卡友刚提交完信用卡申请,就跑来咨询要多久能拿到信用卡。这里只能说信用卡申请时间由好几个阶段组成的,包括审批时间、制卡时间、寄卡…
-
卡拉合伙人:清明节银盛、付临门、易生、中付、瑞银信、拉卡拉等发布到账安排
清明节银盛、付临门、易生、中付、瑞银信、拉卡拉等发布到账安排 支付曝光台讯:根据国务院办公厅《关于2020年部分节假日安排的通知》国办发明电〔2019〕16号),2020年清明节放…
{kind=link}